


Robot de limpeza de paneis solares totalmente automatizado
Descrición do produto
O deseño exclusivo do sensor de visión oculta antirreflexo garante que o robot poida adquirir con precisión información de posicionamento mesmo en ambientes con moita contaminación ou luz brillante, o que permite un posicionamento de alta precisión dos módulos fotovoltaicos.
Sen ningunha modificación no campo, o propio sistema de visión de IA do robot pode lograr unha navegación de posicionamento milimétrico na superficie do módulo. Sen vixilancia humana, pode detectar, planificar e tomar decisións de forma autónoma para unha automatización da limpeza perfecta.
O robot de limpeza fotovoltaica portátil ten 6 características principais do produto:
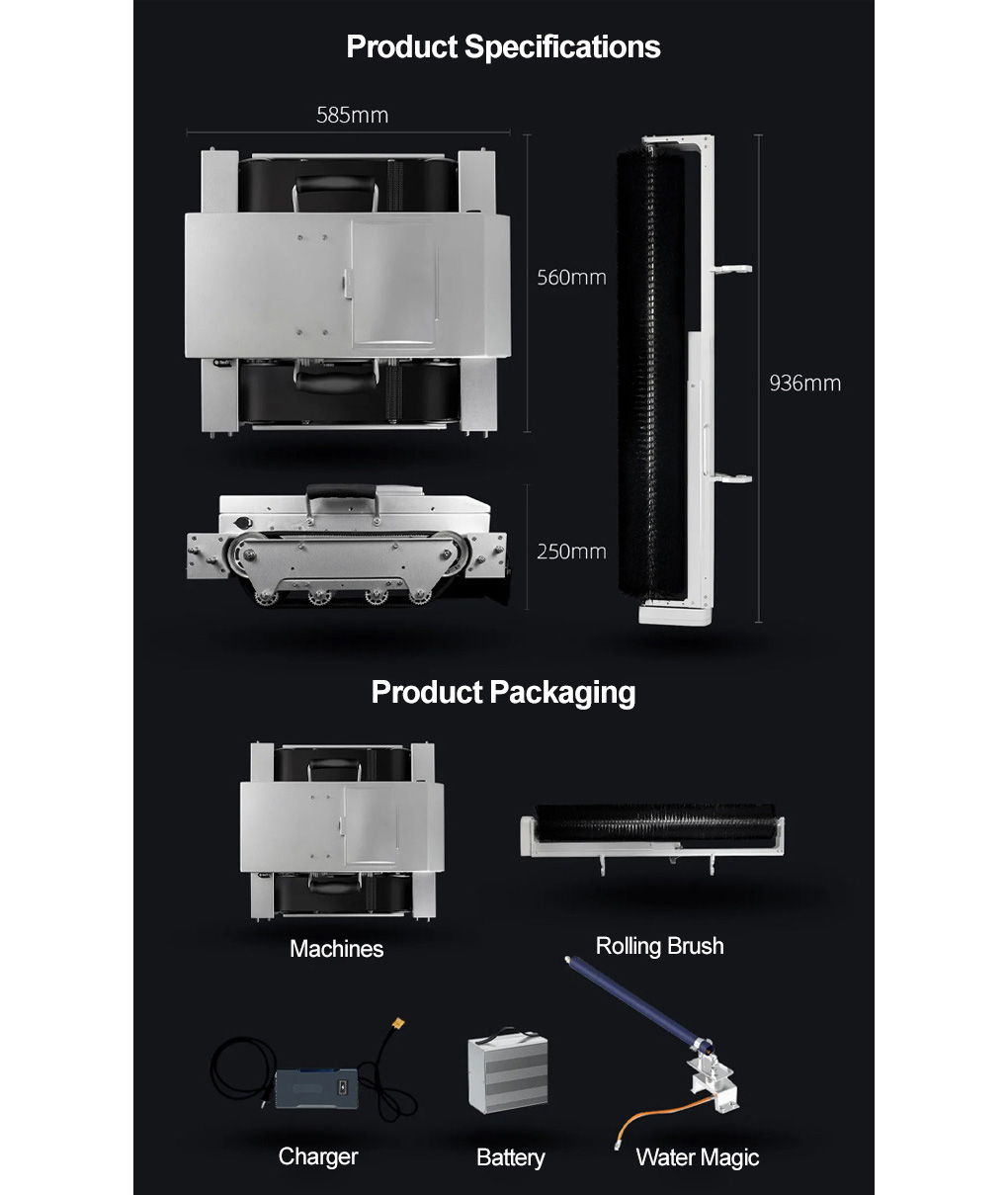
1. A batería pódese substituír e a duración da batería non ten problemas.
Un só robot alimentado por 2 baterías de litio, pode facer que toda a máquina funcione sen interrupcións durante 2 horas. Deseño de desmontaxe rápida tipo clip de bala, o tempo de resistencia amplíase facilmente.
2. Limpeza nocturna. Retorno automático de baixa potencia.
O robot de limpeza pode realizar operacións de limpeza con seguridade pola noite e volver ao voo con baixa potencia e posicionamento autónomo. O tempo diúrno non afecta á xeración da central eléctrica, o que mellora significativamente a eficiencia da xeración de enerxía do usuario.
3. Panel lixeiro e portátil, 0 carga
Uso innovador de materiais aeroespaciais e deseño lixeiro de toda a máquina para evitar danos por pisoteo no panel fotovoltaico durante o proceso de limpeza. O deseño da estrutura lixeira reduce a carga de manexo para os usuarios e unha soa persoa pode despregar e xestionar rapidamente ducias de máquinas ao mesmo tempo, aforrando custos de limpeza e mellorando eficazmente a eficiencia do traballo.

4. Rotación inicial cunha soa tecla. Ruta de planificación intelixente.
O robot intelixente pódese iniciar cun só toque de botón. O modo especial de limpeza rotatoria, equipado con sensores integrados, permite que o robot detecte o bordo da matriz, axuste automaticamente o ángulo, calcule independentemente a ruta de limpeza óptima e eficaz, e cubra todo sen perder nada.
5, camiñada escalonada por adsorción para adaptarse a unha variedade de superficies oblicuas
O robot adhírese estreitamente á superficie dos paneis fotovoltaicos mediante ventosas móbiles, e a distribución escalonada das ventosas auxiliares permítelle camiñar con maior estabilidade en pendentes suaves de 0 a 45°, adaptándose a diversos entornos operativos complexos.
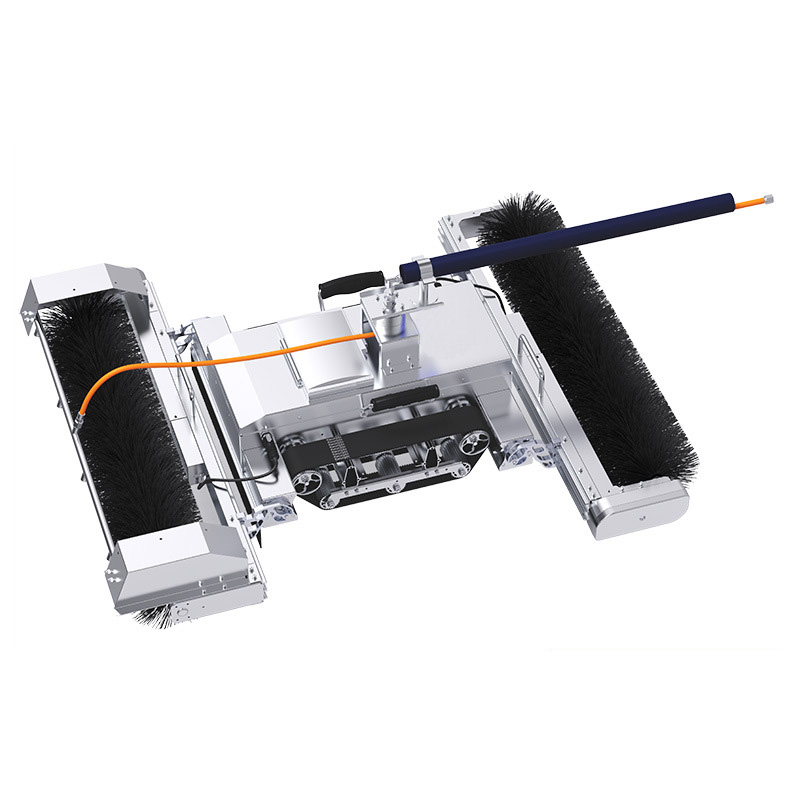
6. Limpeza sen auga nano turboalimentada máis excelente
Unha única unidade de limpeza está equipada con dous cepillos de rolos de nanofibra que xiran en direccións opostas, que poden recoller as partículas de po adsorbidas na superficie e recollelas para seren aspiradas instantaneamente na caixa de po a través da forza centrífuga do ventilador centrífugo turboalimentado. Non é necesario repetir a mesma área, limpando sen consumo de auga, protexendo o medio ambiente e aforrando enerxía.



-

Teléfono
-

Correo electrónico
-

Whatsapp
-

Arriba